1.功能
平衡重式四支点叉车的后桥中心与车架是铰轴连接,叉车后轮轴的中心和两个前轮是支撑车体的3个支点,构成所谓的叉车重心稳定的三角形。在凹凸路面上,通过后轮轴的上下摇摆来吸引凹凸路面带来的振动。但叉车在急速拐弯时会出现车辆倾斜,导致重心偏移,严重的会造成车辆侧翻,特别是在货叉高载重并处于高位时急转弯,发生侧翻的可能性很大。在叉车各类安全事故中,叉车倾翻造成事故约占42%。因此,提高叉车转弯稳定性是减少这类事故的关键措施。后轮摇摆锁定控制系统(Active control rear stabilizer)就是专为避免这类安全事故的解决方案,通过减小车辆急速拐弯时的倾斜度,使叉车转弯时更稳定,更快速。
2.组成与原理
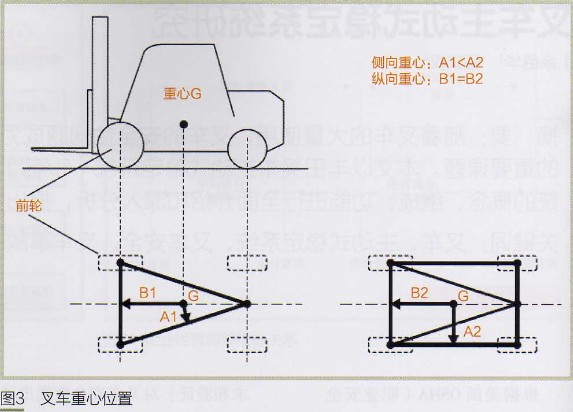
叉车行驶时要保持稳定,重心G必须落在图3稳定三角形内,但在急速转弯时车身倾斜,重心G即可能落在稳定三角形外,造成一侧的车轮离地,车辆就可能发生倾翻。要避免这种情况发生,必须扩大稳定区域,如果能在转弯时通过铰轴连接的车架与后桥锁定,这时叉车就成为四点支撑,形成稳定四边形区域(见图3)。这时,重心纵向距离不变,侧向距离增大,即B1=B2,A1
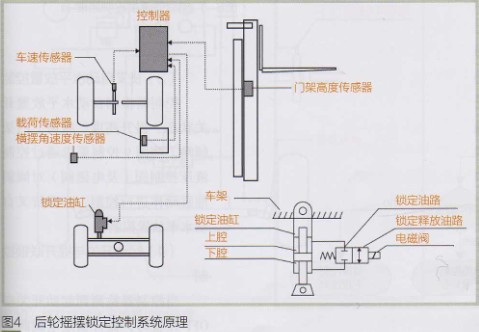
如图4所示,后轮摇摆锁定控制系统由锁定油缸、电磁阀、载荷传感器、横摆角速度传感器、车速传感器、门架高度传感器、控制器等构成。锁定油缸的锁定与释放由电磁阀接受控制器指令进行控制,电磁阀为二位二通电磁阀,电磁阀在锁定释放位置,锁定油缸上下腔连通,车架可自由摆动,叉车处于正常三支点状态;电磁阀在锁定位置,锁定油缸上下腔关断,车架与后桥刚性连接,叉车成为四支点支撑,提高了稳定性。
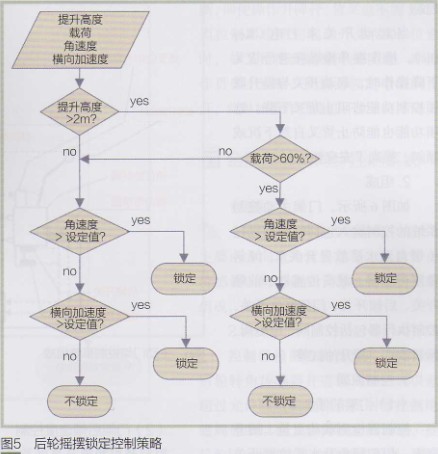
锁定油缸在以下两种情况下发生锁定,一是车辆急转弯时,离心加速度超过控制器设定值时锁定;二是车辆急转弯时,角速度超过控制器设定值时锁定。在这两种情况下,控制器通过车速传感器检测车速,横摆角速度传感器检测角加速度,计算离心加速度,实施控制。具体控制策略如图5所示。

价格:面谈

价格:面谈

价格:面谈
价格:面谈
新时代鞋服物流与供应链面临的变革和挑战03月07日 20:38

点赞:这个双11,物流大佬一起做了这件事11月22日 21:43

物流管理机构及政策分布概览12月04日 14:10

盘点:2017中国零售业十大事件12月12日 13:57

2017年中国零售电商十大热点事件点评12月28日 09:58
